")




По аналогии с естественным миром, зрение является основной неотъемлемой составляющей робототехнических комплексов. В связи с чем, одной из актуальных задач в современной разработке роботов является решение проблемы создания новых, усовершенствованных систем, алгоритмов, методов и принципов пространственной навигации роботов.
Применяемые в робототехнике системы оперируют различными операциями, некоторых из них может не быть или они могут быть объединены с другими, и выполняться в различной последовательности. Все эти системы отличаются широким разнообразием и предусматривают структурные и функциональные различия в зависимости от поставленной задачи. При работе в сложных условиях значительно усложняется круг решаемых задач с помощью роботов и, соответственно, возрастает необходимость в разработке универсальной системы технического зрения снабженной соответствующими средствами для решения сложных функциональных задач.
В результате можно создать систему для любого конкретного случая технического зрения, в разы превышающую возможности человеческого глаза. Возможности, эффективность и гибкость системы технического зрения существенно зависят от алгоритмического обеспечения. Особенности робототехнического программного обеспечения напрямую зависят от выбора аппаратных средств и алгоритмической поддержке системы для реализации поставленной задачи.
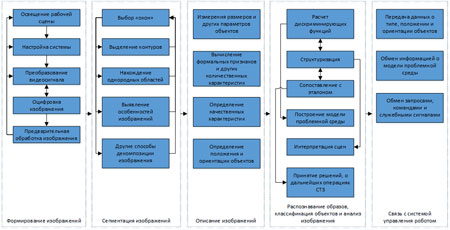
В данной работе автор подробно рассматривает такие аспекты в разработке мобильных роботов, как особенность решения робототехнических задач, актуальность разработки новых алгоритмических и программных средств, обеспечивающих эффективную поддержку всех режимов функционирования системы технического зрения. Применяемые подходы и текстовые выкладки выдвигаются на основе методов распознавания образов, дискретных преобразований, цифровой обработки изображений и системного анализа. В работе также рассматривается формирование 3D-моделей поверхности объекта, применительно к мобильным роботам, представлена обобщенная функциональная схема системы технического зрения робота. Результаты исследования будут полезны в различных системах мониторинга, системах модернизации управления, мультисенсорной обработки информации, при разработке робототехнических комплексов и систем.