")




The problem of finding routes for unmanned aerial vehicles on various graphs of reference points on the ground using a genetic algorithm is considered. A comparison of methods for constructing graph functions based on the algebraic number-theoretic approach, as well as using transcendental functions, is carried out.
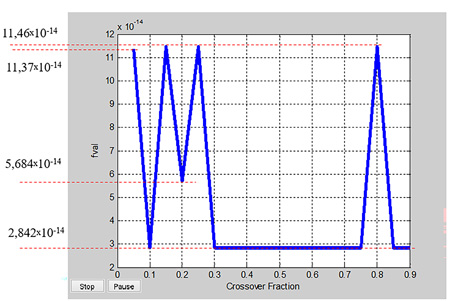
Consideration of examples of objective functions constructed by algebraic methods taking into account the multiplicity of the numbers of vertices in a closed route shows that this approach leads to false routes for graphs of large dimension. This drawback can be eliminated by taking into account the individual information about each edge of the graph. This is ensured by encoding the edges of the graph by terms or by some numerical value in the form of its unambiguous expansion. The construction of the objective function is based in this case on the number-theoretic properties of the s-ary expansion or on the decomposition of an integer into prime factors. Number-theoretic objective functions uniquely take into account the individuality of each edge. Such coding of edges defines a theorem for constructing objective functions on graphs, based on the unambiguous expansion of a numerical value in a sum or product. Further studies show that not only numeric values can be used as numeric codes, but also functions that more fully reflect information about the features of routing functions on graphs and have the properties of an unambiguous expansion. The combination of the properties of the device and function leads to its transcendence and the possibility of using it in the construction of target functions. The constructed transcendental objective functions are tested on examples of various graphs. The relationship of the applied problem of routing unmanned aerial vehicles on the ground with mathematical optimization on graphs of means of number theory and a genetic algorithm is shown. Calculations of routes for transcendental objective functions can be applied in automated control systems.