")




By analogy with the natural world, vision is the main integral component of robotic systems. In this connection, one of the urgent tasks in the modern development of robots is to solve the problem of creating new, improved systems, algorithms, methods and principles of spatial navigation of robots.
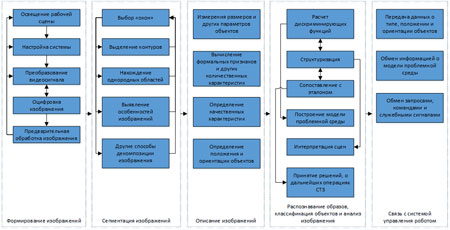
The systems of technical vision used in robotics operate with different operations, some of them may not be or they can be combined with others, and performed in an absolutely different sequence. All these systems differ in a wide variety and naturally provide for certain structural and functional differences depending on the task. When working in difficult conditions, the circle of solved problems becomes much more complicated with the help of robots and, accordingly, there is a growing need to develop a universal systems of technical vision equipped with appropriate means for solving complex functional problems.
As a result, you can create a system for any particular case of technical vision, which is several times greater than that of the human eye. The functionality, efficiency and flexibility of the STV are highly dependent on its algorithmic support. Features of the robotic software directly depend on the choice of hardware and algorithmic support of the operation of the systems of technical vision for the implementation of a clearly defined task.
In this article, the author examines in detail such aspects of the development of mobile robots as a function of solving robotic tasks, the urgency of developing new algorithmic and software tools that provide effective support for all operating modes. Applied approaches and textual calculations are advanced on the basis of image recognition methods, discrete transformations and digital image processing and system analysis. The work also considers the formation of 3D models of the object surface, applied to mobile robots; the generalized functional diagram of the systems of technical vision of the robot is presented. The results of the research will be useful in various monitoring systems, control modernization systems, multisensory information processing, in the development of robotic complexes and systems.