")




In the work the questions of the robotic complexes counteraction systems improvement are considered. The aim of the research is to increase the objects security of from the risks realized by the robotic complexes application. To achieve the aim of the research the new approach of the creation of robotic complexes counteraction systems, which is based on the universal managing platform application, is offered.
Its use will allow to significantly expand the object physical protection system possibilities in case of counteraction to robotic complexes groups.
The following results of the research are received:
– the analysis of the of military, special and dual purpose robotic complexes global development trends and modern means to counteract them. It was revealed that the objects protection against modern robotic complexes in case of their group application is not enough because of the limited robotics counteraction systems opportunities;
– the main requirements to the perspective robotic complexes counteraction system, making possible the creation of the security features, that will counteract the modern robotic complexes in case of their group application, are defined;
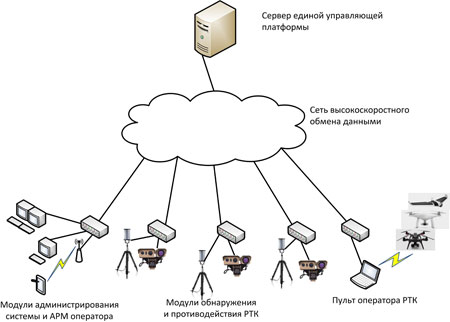
– the perspective robotic complexes counteraction system functional model, based on the universal managing platform application, is developed;
– the perspective robotic complexes counteraction system structural model, displaying its basic elements and interrelations between them, is offered;
– the perspective robotic complexes counteraction system architecture, based on the Open systems interconnection basic reference model, is developed, and the possible technologies and protocols of the information transfer between its elements are shown;
– the perspective robotic complexes counteraction system creation sequence, that take into account the arising specific scientific and technical tasks, is offered.
The results received in work are of interest to the industry enterprises and federal executive authorities ensuring the protected objects safety.