")




The methods of control of hovering spacecraft active (AA) is a relatively passive system (PAS), construction line which is in the inertial space fixed position. In the case when in the system of orientation and angular stabilization of the PA as the reference frame used a non-rotating relative coordinate system (USC).
Hang one space vehicle (SV) relative to one another is one of the varieties of the group flight (GS) orbital objects in space. Under GP is controlled relative motion (OD) of two or more SPACECRAFT, in which the relative distance between them is either not changed or changed by a law in some quite limited extent, and, moreover, this distance remains significantly smaller their distance to the center of the planet.
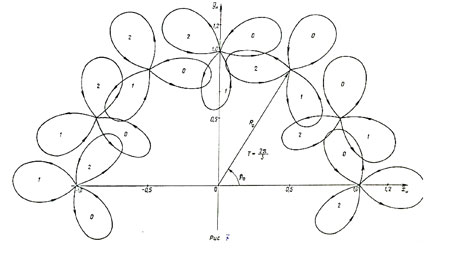
A distinctive feature of hovering as a kind of GP is to ensure that all times during this flight, the condition of invariance of position AA in the USC with the origin at the center of mass PA. The need for such a situation may arise when the task of identification of space objects, the implementation of docking with space stations with multiple docking ports, rescue the crews of manned SPACECRAFT in emergency situations, etc. are found In work control actions necessary for the implementation of AA in the non-rotating hovering USC. They are continuous-time functions in which the coordinates of the point of unresponsiveness play a role of parameters. The obtained relations for estimating energy (EZ) in the implementation of these control actions. It is shown that at any given time hovering to reduce EZ it is advisable to perform it at a point lying in the USC at an angle numerically equal to one-half of the time.