")




Questions of complex use of diverse radio channels of management of robotic complexes of sea basing with use of the single system of radio monitoring constructed on the principles of functioning of cognitive radio systems are considered.
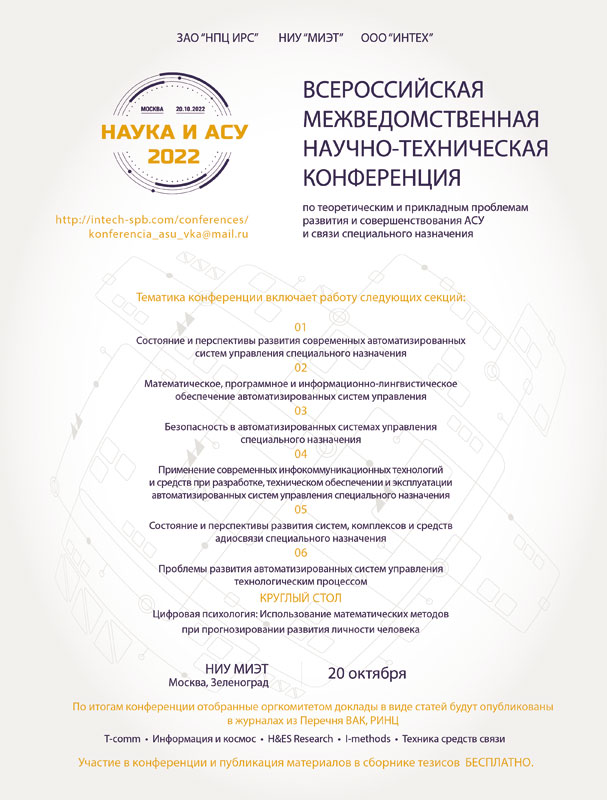
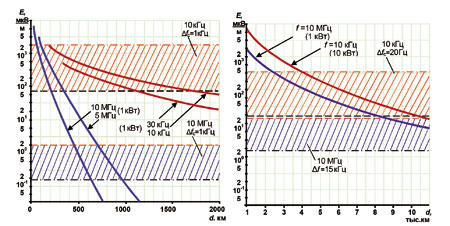
The plan of creation of single system of radio monitoring as for the benefit of subscribers of radio networks and the radio directions of department, and it is direct for the benefit of basic control centers groups of the robotic complexes using radio lines of superlong-wave, decameter, ultrashort-wave and space communication is provided. The analysis of applicability of radio channels of various wave bands in case of management of a robotic complex is this, both in surface, and in the deep-shipped provision. At the same time along with radio channels application of optical, parametrical, hydroacoustic and electromagnetic communication is considered. Possibilities of the mixed groups of the robotic complexes operating in different environments (space, air, water) on increase in efficiency of accomplishment of the set mission are estimated. Possible methods of information exchange between submersibles are considered and an assessment of the maximum range in case of data exchange between the deep-shipped objects on the hydroacoustic channel is given. The arising difficulties in reasons for options of creation of distributed control systems by the mixed groups of robotic complexes, the ensuring necessary stability of control paths consisting in impossibility and interaction in group on borders of physical environments, and also small ranges in ensuring hydroacoustic communication are revealed. The comparative characteristic of the main types of modems of hydroacoustic communication of domestic and foreign manufacturers is this. Offers on further increase in range of hydroacoustic communication due to reduction in the rate of transfer and use of hydro-acoustic modems of "parallel type" are formulated. Calculations of a rational number of the robotic complexes operating in group are given. The conclusion is drawn that essential increase in efficiency of actions of the mixed robotic group is reached along with complex use of diverse control paths application of the methods based on modern technologies of programmable radio with elements of cognitive radio systems, artificial intelligence and neurobionics when handling of the accepted information during intensive information interaction on the basis of general databases of the distributed systems.